We emerged victorious in the Humanoid League Kid Size at the RoboCup German Open 2025. The competition, held in Nuremberg, saw us face off against the WF Wolves in a series of matches, culminating in a decisive 6-0 win in the final.

Competition Overview
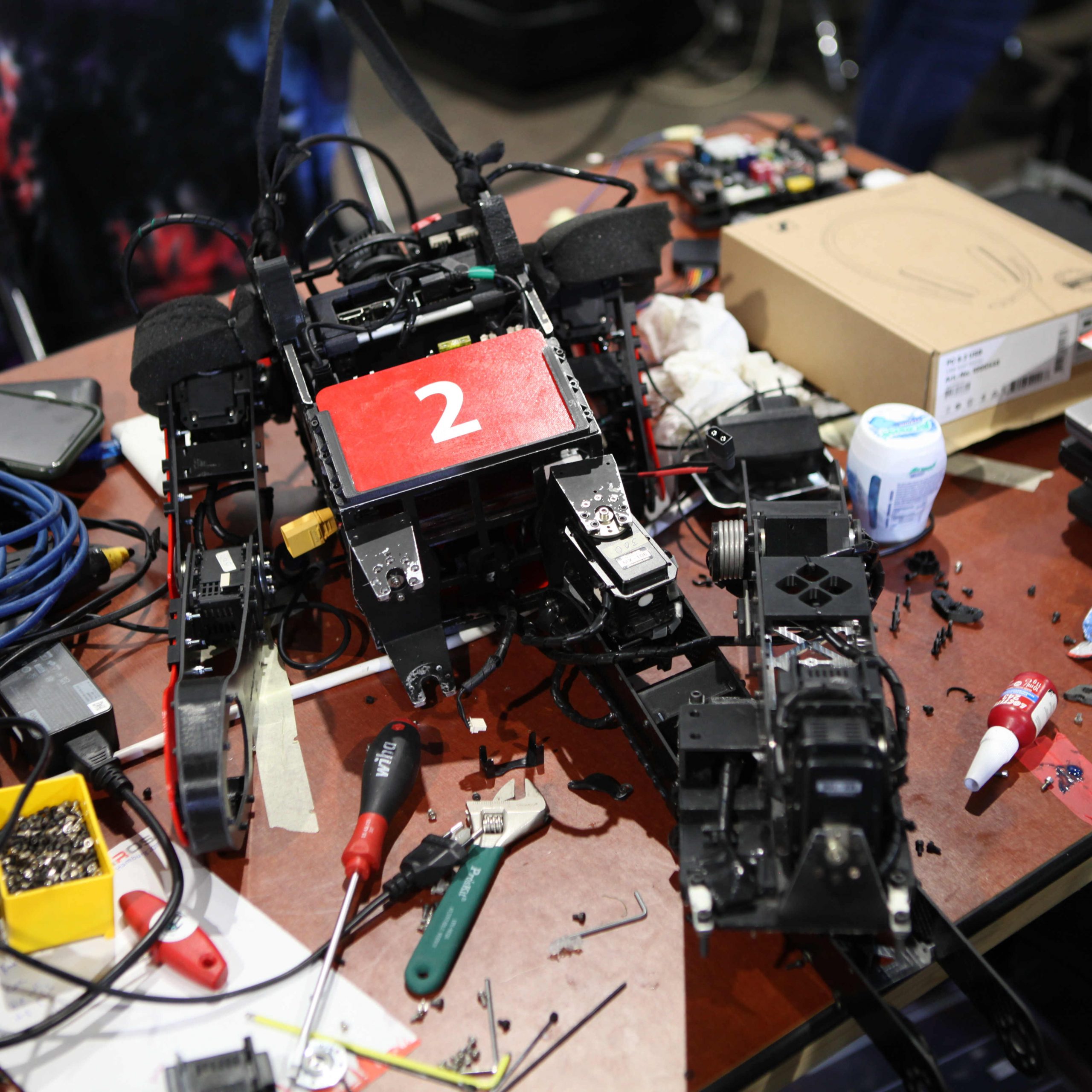
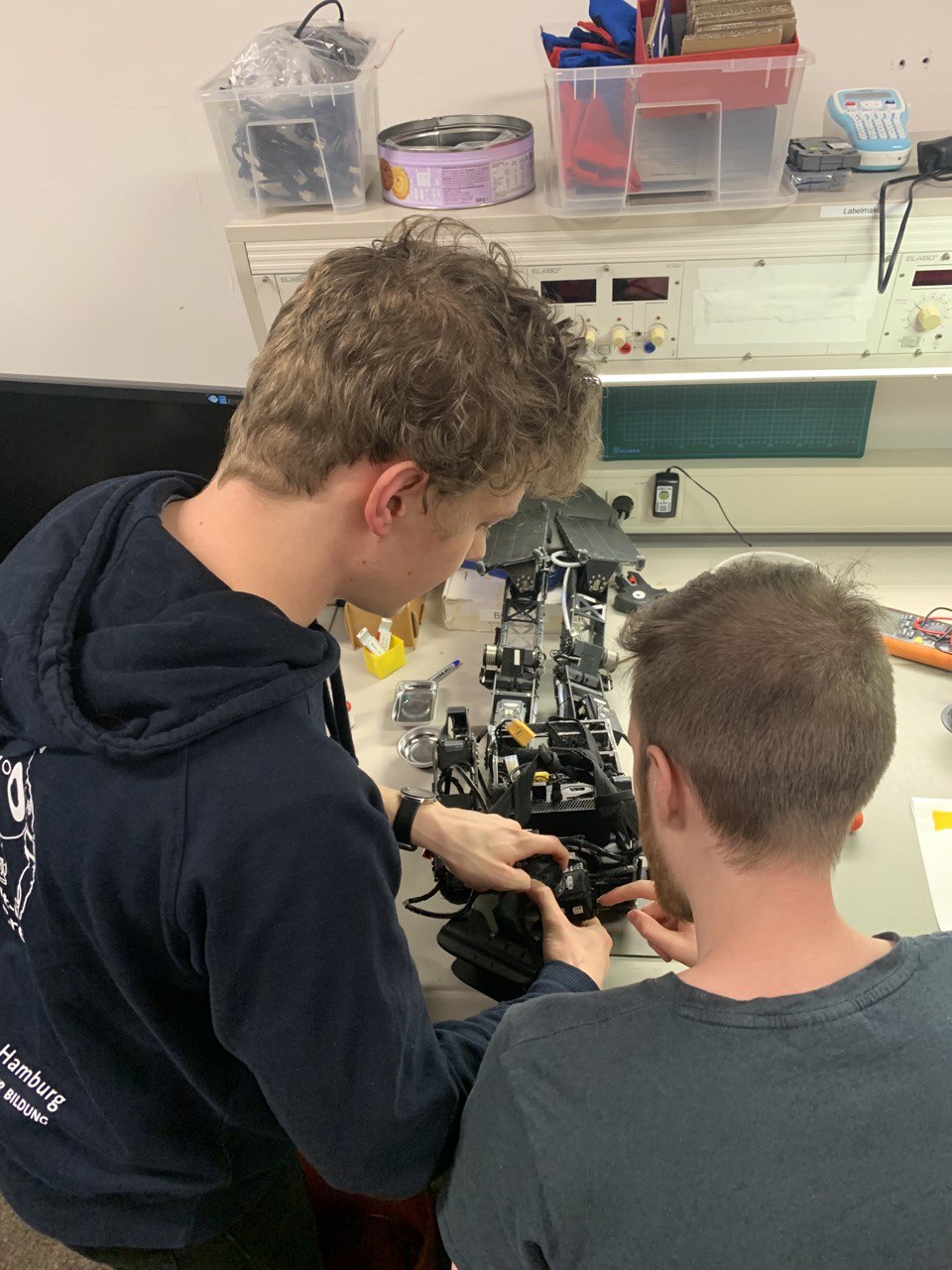
We started the competition with significant hardware challenges, having only 1-2 operational robots. However, through diligent repairs and maintenance during the event, we managed to get four robots up and running by the end, including Amy, who had been out of commission since a collision at the last RoboCup World Cup in Eindhoven.
Throughout the competition, we played multiple games against the WF Wolves. Although only the final game counted towards the standings, we won all our matches, consistently leading by at least three goals. We conceded only one goal during a penalty situation where we were playing with a single robot due to maintenance issues with the others.
Software and Hardware Developments
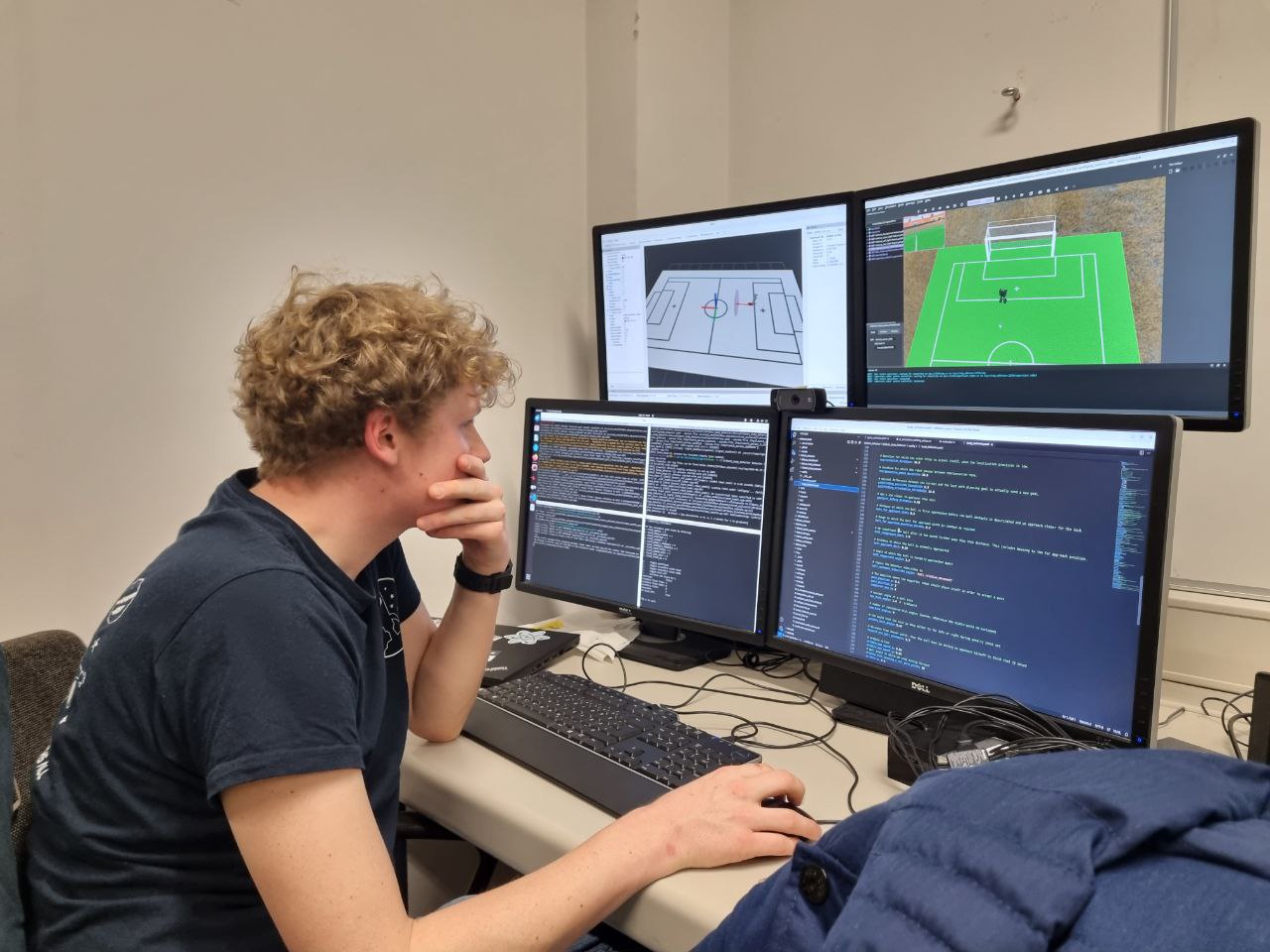
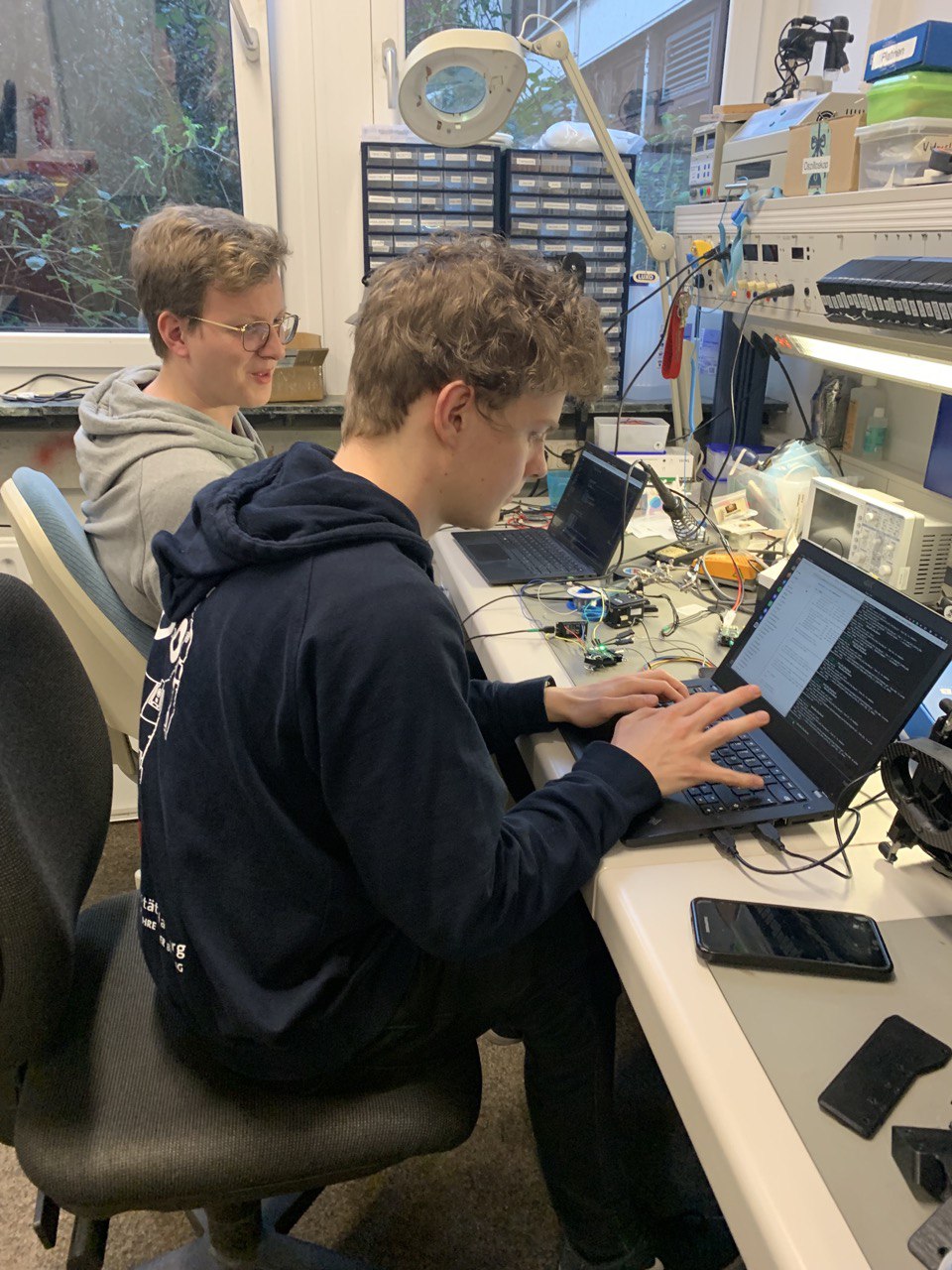
We focused primarily on hardware repairs and maintenance during the competition. However, we also utilized a new path planning algorithm and an actual throw-in mechanism for the first time in a match. Both of these features were developed by students in the Bit-Bots Project 2024-25. Although there were no in-game throw-in situations, we tested the new features and were satisfied with the overall software performance.

In an unexpected turn, we had the opportunity to test our software on a commercially available adult-size robot from Booster Robotics, the Booster T1. This robot, borrowed from a Chinese team in the adult-size league, was significantly faster and more robust than our own robots. We adapted our software to run on the Booster T1, excluding the motion control, and participated in a test game where the Booster T1 was the only autonomous robot, playing against remote-controlled Booster T1 opponents. Our software performed well, maintaining localization and effectively blocking the ball.

During the setup of our software stack on the Booster T1, we encountered two issues. First, the robot thought it barely moved, but in reality, it was moving a lot. Upon investigating the localization data, we found a “Dropping motion due to robot moving an unreasonable amount” error. The robot was so fast that the localization system deemed its movements erroneous, even though they were accurate. Additionally, our walk speed was initially capped at 1 m/s because the slider in our parameter GUI did not allow for higher speeds. Despite these challenges, our robot performed arguably better than the humans remotely controlling the other robots, which also experienced notable control delays.
The Booster T1 robots also won the adult-size league, playing against the Sweaty team. The Standard Platform League (SPL) teams showed considerable interest in the Booster robots, as the future of the NAO robots remains uncertain.
Travel and Accommodation
We traveled to Nuremberg by train, carrying all our robots and tools. We stayed in an Airbnb conveniently located near the U-Bahn, making travel to and from the competition venue easy.
German Robotics Conference (GRC)
The RoboCup German Open 2025 also hosted the first German Robotics Conference (GRC), where one of our team members presented a paper. The conference attendees had the opportunity to visit the German Open, adding an academic dimension to the event.
Conclusion
Overall, the RoboCup German Open 2025 was an incredible experience for us. We had a lot of fun and gained valuable insights, especially from working with the Booster T1. It was exciting to see our software run on another platform with very few changes, and we learned a lot from the process. We’re already looking forward to the next competitions and can’t wait to apply what we’ve learned.