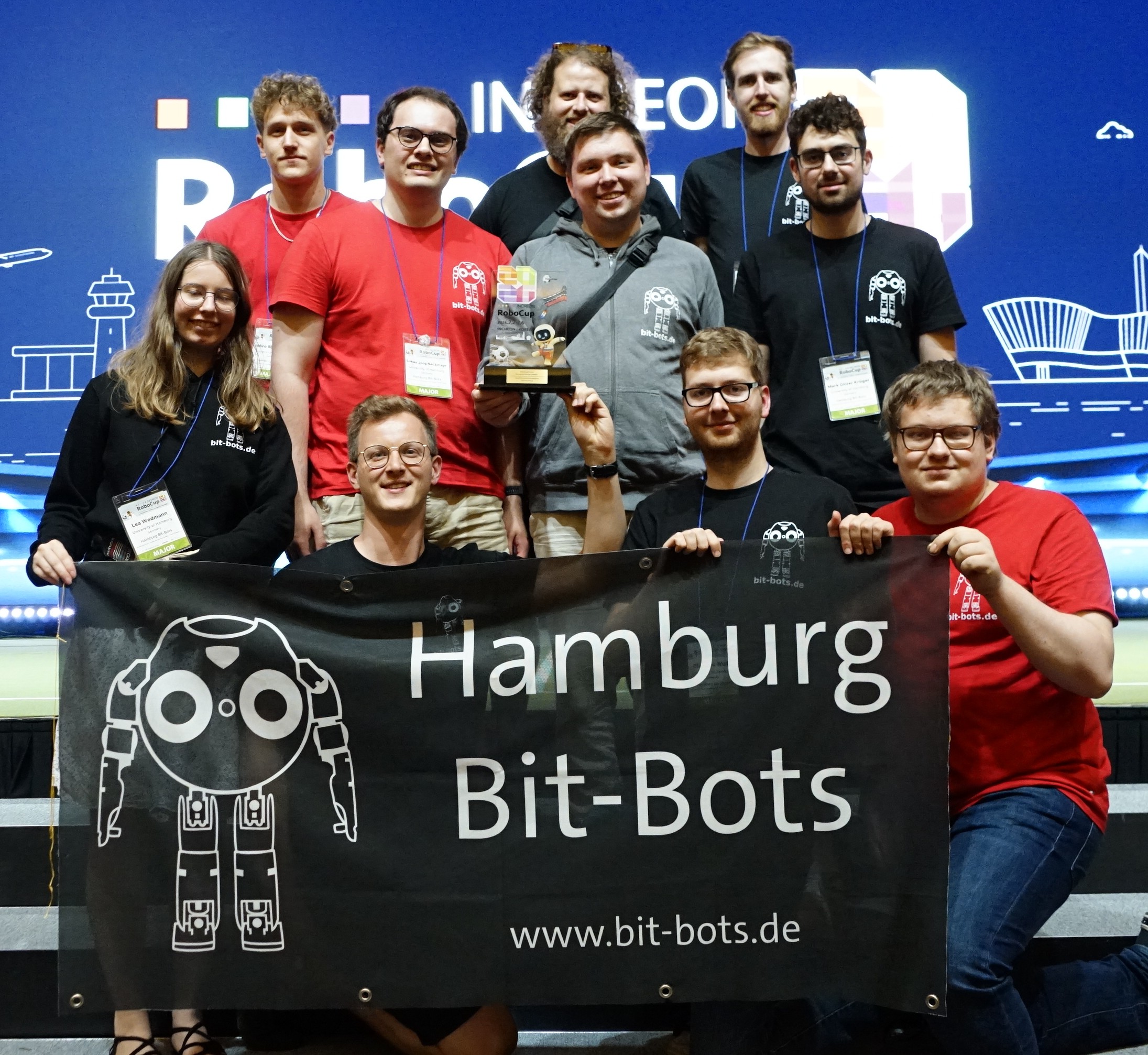
Die Bit-Bots haben sich den zweiten Platz in der Small Size Division der Humanoid Soccer League des RoboCup 2026 erspielt! Damit haben wir das beste internationale Ergebnis in der Geschichte unserer Arbeitsgruppe erreicht. Vom 30.06.2026 bis zum 05.07.2026 haben wir alles gegeben, um dieses Ziel zu erreichen.

Ein holpriger Start
Der Wettbewerb begann allerdings mit einigen Rückschlägen. Zunächst fiel einer unserer Flüge aus, wodurch wir erst einen Tag später in Incheon ankamen. Genau dieser Tag war jedoch bereits der erste von zwei Setup-Tagen, an denen die Roboter an das neue Spielfeld angepasst werden können – Zeit, die wir natürlich gerne vollständig genutzt hätten.
Der zweite Rückschlag folgte direkt nach unserer Ankunft auf dem Messegelände: Vier Teams waren mit deutlich leistungsstärkeren Robotermodellen angereist, als sie ursprünglich angemeldet hatten. Dadurch sanken unsere Chancen auf den Gesamtsieg erheblich. Statt uns entmutigen zu lassen, hat uns diese Situation jedoch zusätzlich motiviert.

Software unter Zeitdruck
Zu Beginn des Wettbewerbs gab es mehrere technische Baustellen, die wir kurzfristig lösen mussten.
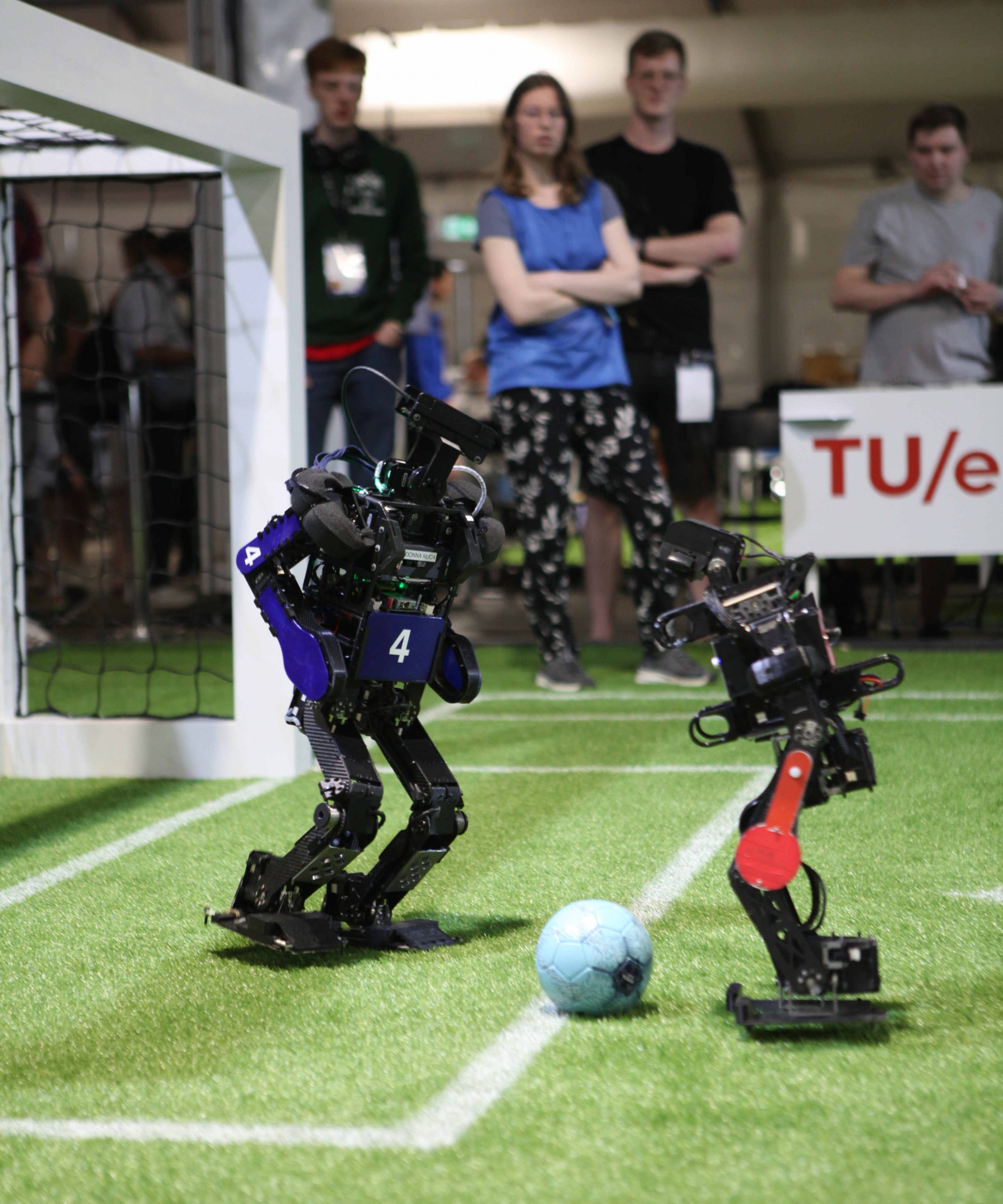
In den vier Monaten, in denen wir den neuen Roboter Mini Pi plus zur Verfügung hatten, hatten wir bereits große Teile der Software angepasst. Unter anderem haben wir das Laufen und Aufstehen neu trainiert. Eine wichtige Fähigkeit fehlte allerdings noch: ein funktionierender Kick.

Zu unserem Glück stellte uns der Hersteller und Sponsor unseres Roboters, High Torque, nur einen Tag vor der Abreise eine funktionierende Kickbewegung zur Verfügung. Diese musste jedoch zunächst in unsere Software integriert werden – eine Aufgabe, die deutlich aufwendiger war, als es zunächst klingt. Nach einigen Tagen intensiver Arbeit war der Kick schließlich spieltauglich und verhalf uns im Turnier zu mehreren wichtigen Toren.
Wenn der eigene Fuß zum Ball wird
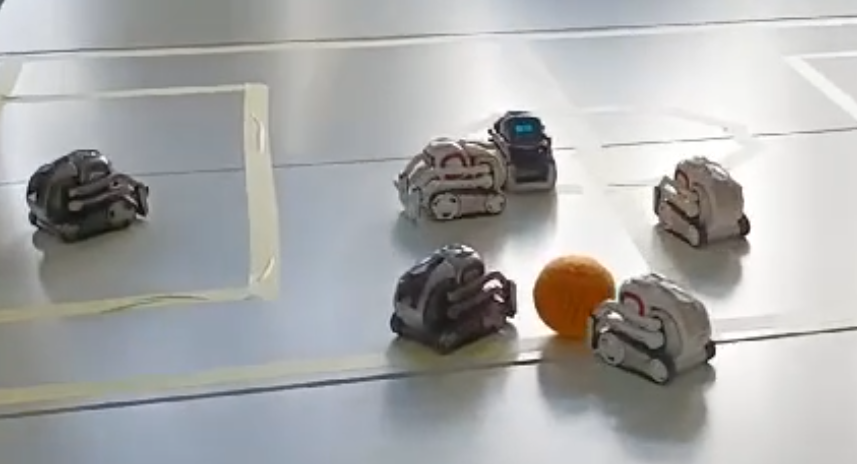
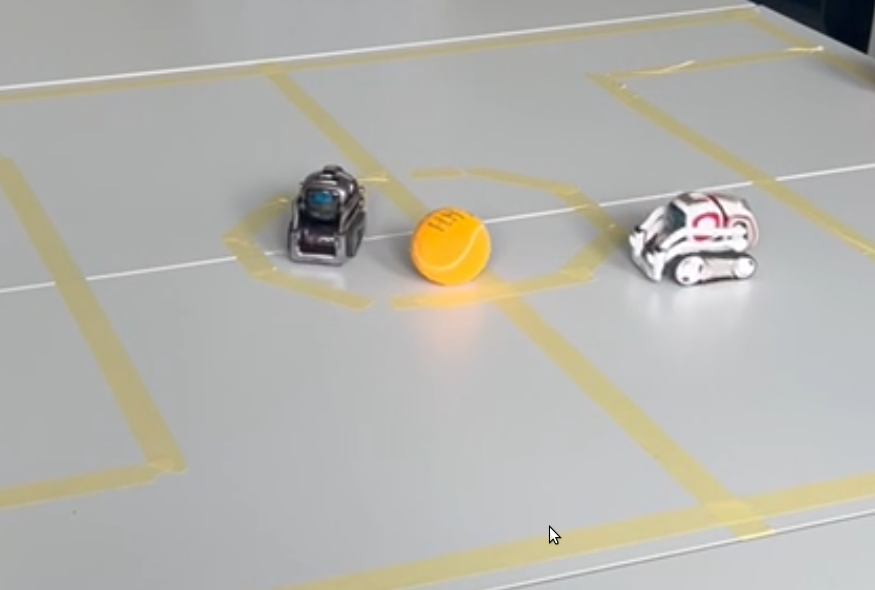
Ein weiteres Problem betraf unsere Bilderkennung. Immer wieder erkannte sie die Füße unserer eigenen Roboter fälschlicherweise als Ball. Das silberne Metall an den Füßen sah in den Kamerabildern tatsächlich teilweise täuschend echt wie ein Fußball aus. Dadurch funktionierte das Teamverhalten nicht mehr zuverlässig und eine schnelle Lösung war dringend notwendig.
Als kurzfristige Maßnahme klebten wir die Füße der Roboter mit schwarzem Panzertape ab, was die Fehlklassifizierungen bereits deutlich reduzierte. Zusätzlich nahmen wir neue Trainingsbilder auf, in denen genau diese Fehlersituationen enthalten waren, und trainierten unser neuronales Netz erneut. Darüber hinaus wechselten wir auf ein verbessertes Modell für die Bilderkennung. Durch diese Kombination konnten wir das Problem vollständig beheben.

Verbesserungen am Teamverhalten
Auch unser Spielverhalten erhielt während der Weltmeisterschaft ein umfangreiches Update. Wir schrieben die Logik für die Positionierung der Roboter grundlegend neu und beseitigten mehrere Fehler.
Möglich wurde dies durch ein Simulations-Setup, mit dem wir das Zusammenspiel von vier Robotern auf einem einzigen Computer testen konnten. Dieses Setup wurde während der gesamten Weltmeisterschaft kontinuierlich verbessert und war letztlich ein entscheidender Faktor für unsere gute Platzierung.

Viele kleine Verbesserungen
Neben den drei großen Softwareprojekten – dem Kick, der Bilderkennung und der neuen Positionierungslogik – arbeiteten wir an zahlreichen weiteren Verbesserungen. So optimierten wir unter anderem unsere Pfifferkennung, testeten schnelleres Aufstehen und höhere Laufgeschwindigkeiten (sogar Rennen ohne Bodenkontakt) im Spielbetrieb und entwickelten die inverse Kinematik für den Kopf des Roboters weiter.
Zwischendurch standen natürlich immer wieder Spiele auf dem Programm, die vorbereitet werden mussten. Zusätzlich übernahmen wir auch Schiedsrichteraufgaben bei Begegnungen anderer Teams.

Acht Spiele, sechs Siege
Während des Wettbewerbs bestritten wir insgesamt acht Spiele, von denen wir sechs gewinnen konnten mit insgesamt 20 geschossenen Toren.
Die Teams mit den leistungsstärkeren Robotermodellen erwiesen sich erwartungsgemäß als unsere schwierigsten Gegner. Gegen dieses Robotermodell konnten wir zwei Partien gewinnen, mussten uns jedoch auch zweimal geschlagen geben – darunter leider mit 6:3 im Finale gegen das Team Invic der Universität Wuhan.
Finale Livestreams:
- Offizieller Livestream (oben eingebunden)
- HSL Liga Feld Livestream
Trotzdem sind wir mit unserer Leistung sehr zufrieden. Gleichzeitig sehen wir noch einige Bereiche, die wir bis zur nächsten Weltmeisterschaft weiter verbessern möchten.


Mehr als nur ein Pokal
Der zweite Platz war nicht der einzige Erfolg dieser Reise.
Die Roboter, mit denen wir beim RoboCup angetreten waren, waren uns zunächst nur bis zum Ende der Weltmeisterschaft ausgeliehen worden. Unser Ziel war es jedoch, auch danach weiter mit ihnen arbeiten zu können. Dafür mussten wir unserem Partner High Torque zeigen, dass wir leistungsfähige Software entwickeln können – und genau das ist uns gelungen.
Besonders gefreut hat uns außerdem der persönliche Austausch mit den Mitarbeitenden von High Torque. Sie unterstützten uns während des Wettbewerbs tatkräftig, etwa als ein Kamerakabel defekt war oder Einstellungen an den Akkus angepasst werden mussten.
Am Ende beschlossen High Torque und wir gemeinsam, die Kooperation fortzuführen. Dadurch konnten wir sieben brandneue Roboter mit nach Hause nehmen. Von den vier Robotern, mit denen wir den zweiten Platz erreicht hatten, mussten wir uns dagegen leider in Incheon verabschieden.

Fazit
Der RoboCup 2026 in Incheon war für uns eine außergewöhnliche Erfahrung. Wir sind stolz auf unsere Leistung, auf alles, was wir während des Wettbewerbs technisch erreichen konnten, und natürlich auf den zweiten Platz.

Jetzt richtet sich der Blick bereits nach vorne: Wir freuen uns auf die nächste Weltmeisterschaft, die 2027 in Nürnberg stattfinden wird.